�����http://www.www.jjxinkai.com��������USRP��DMR������о����(y��n)�Cϵ�y(t��ng)��(sh��)�F(xi��n) ����ժҪ��DMR(Digital Mobile Radio)��ETSI��2004������ļ�Ⱥͨ��ϵ�y(t��ng)��(bi��o)��(zh��n)�������ģ�Mͨ�ŵ���(sh��)��ͨ���^�ɵĘ������ѽ�(j��ng)�õ��ˏV����ʹ�á����Ļ���ܛ���o���˼�룬����˻���DMR�f(xi��)�h�Ĕ�(sh��)����(du��)�v�C(j��)�Ľ�Q��������ͨ�^�(y��n)�Cϵ�y(t��ng)�������·�Ĵ���Լ��Z��κ����Z���M��DMR��(bi��o)��(zh��n)�I(y��)��(w��)�Č�(sh��)�F(xi��n)��(du��)��Q�����Ŀ������M(j��n)�����(y��n)�C��ϵ�y(t��ng)���õ����P(gu��n)�I���g(sh��)��4CP-FSK�{(di��o)�ƽ��{(di��o)���g(sh��)���aԪͬ���c��ͬ����������̖(h��o)̎���ȣ���ģ�K�Ϊ�(d��)���b������ϣ��S����ܛ���o���ϵ�y(t��ng)�IJ��νM���죬Ҳ������ܛ�˱��ڼ��ɻ��ߏ�(f��)�õ�����ϵ�y(t��ng)�С� �������õ�ַ��http://www.eepw.com.cn/article/145480.htm����ǰ�� ����DMR��Ⱥͨ��ϵ�y(t��ng)��ETSI��2004�����[1] �c�W��TETRA��(bi��o)��(zh��n)[2]��������iDEN��(bi��o)��(zh��n)[3]������(n��i)��������֪�R(sh��)�a(ch��n)��(qu��n)��GoTa��(bi��o)��(zh��n)��GT800��(bi��o)��(zh��n)���О�ȫ�������ļ�Ⱥͨ��ϵ�y(t��ng)��(bi��o)��(zh��n)��DMRϵ�y(t��ng)�^�����ׂ�(g��)��(bi��o)��(zh��n)ϵ�y(t��ng)��(f��)�s�Ը��ͣ��ԃr(ji��)�ȸ���[4-5]��DMR֧�֏�ģ�M����(sh��)�ֵ�ƽ���^�ȡ�DMR���Ӆf(xi��)�h����D1��ʾ�����������ӣ����g���ǔ�(sh��)��(j��)�·�ӣ����ό��Ǻ��п��ƌӣ����όӑ�(y��ng)������_�֣�DMRϵ�y(t��ng)�ɷ֞��Ñ�ƽ��Ϳ���ƽ�档����  �������нӿ��������Ҫ����ģ�K����4CP-FSK�{(di��o)�ƽ��{(di��o)���հl(f��)�D(zhu��n)�Q��RF���ԣ������c��̖(h��o)���x���l��ͬ������̖(h��o)ͬ����ͻ�l(f��)��(g��u)�ɵ�;��(sh��)��(j��)�·�ӱ��ֳ��˃ɲ��֣����Ñ���ؓ(f��)؟(z��)̎��]�И�(bi��o)�ϵ�ַ���Ñ���Ϣ;�ڿ�����ؓ(f��)؟(z��)��ݔ������Ϣ�����ƌ���Ҫؓ(f��)؟(z��)����ͨԒ���ṩDMR֧�ֵIJ�ͬ�I(y��)��(w��)��ͣ������̔�(sh��)��(j��)�ͷֽM��(sh��)��(j��)����(w��)�ȡ�DMR��(sh��)��ϵ�y(t��ng)������Q����һֱ�о����c(di��n)����Q�������@����(sh��)�F(xi��n)���ɏ�(f��)���ԏ�(qi��ng)�����c(di��n)չ�_���ڱ�Փ���У��҂��Y(ji��)��ܛ���o��늵ă�(y��u)��(sh��)�cDMRϵ�y(t��ng)�����c(di��n)�������DMR��(sh��)��(du��)�v�C(j��)���w��Q�����������f(xi��)�h����(sh��)�F(xi��n)���͌ӽ��ՙC(j��)�c�l(f��)��C(j��)����ͬģ�K�g�ӿڶ��x��ģ�K�g��������������Ҫ��(sh��)�F(xi��n)������Ϣ̎�������l�{(di��o)�ƽ��{(di��o)�����к��w��������P(gu��n)�I���g(sh��)��Փ��[6]��(du��)4FSK�M(j��n)���U��������Q����ʹ����λ�B�m(x��)���l���I���{(di��o)�Ʒ�ʽ�� ����ȫ��(sh��)��DMR��Q���� ����ϵ�y(t��ng)��(g��u)�D ����ܛ���o������ìF(xi��n)��ܛ�����ٿv�����Ƃ��y(t��ng)��“��Ӳ���·”�ğo��ͨ��[7]��ȫ��(sh��)��DMR��Q��������ܛ���o��늵ļܘ�(g��u)��ϵ�y(t��ng)��DҊ�D2����Ҫ���Z������a��DMR�f(xi��)�h̎�������lǰ�������ֽM�ɡ������Z������a����AMBE USB-3000;DMR�f(xi��)�h̎������ͨ��̎������(sh��)�F(xi��n);���lǰ�˲���USRP��AMBE USB-3000�Z��ģ�K��USRP���l�l(f��)��C(j��)�c���ՙC(j��)ģ�K������  ��������̎�������DMR���Ӆf(xi��)�h̎����USB-3000��ɵ����ʵ��Z�s��USRP(Universal Software Radio Peripheral)��ͨ��ܛ���o�������O(sh��)��[8]�ɸ�����̖(h��o)̎����FPGAĸ��Ϳɸ��Q�ĸ��w��ͬ�l�ʵ��Ӱ�ɂ�(g��)�M����ؓ(f��)؟(z��)���l�K�˰l(f��)���c���գ�USRP�c̎����ͨ�^USB�������B��̎�������Ԅ�(d��ng)���ú��{(di��o)���ѷ�õ�API����(sh��)ʹ��USRP��̎�����cUSB-3000�Z�sģ�Kͨ�^USB�����B�ӡ� ����������P(gu��n)�I���g(sh��)��(sh��)�F(xi��n) �������õ�ַ��http://www.eepw.com.cn/article/145480.htm�������l�{(di��o)�ƽ��{(di��o) ����DMR���õ�4CP-FSK�{(di��o)�Ʒ�ʽ����4FSK�{(di��o)�Ʒ�ʽ�е�һ�N��4FSK�Dz��û�����̖(h��o)�����d�����l�ʂ�����Ϣ������̖(h��o)“-3”�������l��f_0���ͣ���̖(h��o)“-1”�������l��f_1���ͣ���̖(h��o)“1”�����l��f_2���ͣ���̖(h��o)“3”�����l��f_3���͡��l���I�ذ����ɷN��һ�N����λ�B�m(x��)�l���I��(CPFSK)�������Ͳ�ͬ����̖(h��o)�r(sh��)����λ�B�m(x��)��ͨ�^�B�m(x��)��λ�{(di��o)��(CPM)��(sh��)�F(xi��n);��һ�N����B�m(x��)��λ�l���I��(DFSK)��CPM�Ǻ���j(lu��)��λ�B�m(x��)�{(di��o)�Ʒ�֮һ��������߾��a���棬խ���ꡢ���ٝL���ͺ���j(lu��)�����c(di��n)���V��ʹ����܊�º͌���ͨ���I(l��ng)��[9]��
����һ��CPM��̖(h��o)���x�繫ʽ(1)��ʾ��
��������Ts�Ƿ�̖(h��o)���ڣ�E�Ƿ�̖(h��o)������fs���d���l�ʣ��ڱ�ϵ�y(t��ng)�����l��10kHz����׃�l���400MHz��φ(t,a)��˲�r(sh��)��λ��φ0�dz�ʼ��λ��a������̖(h��o)���M(j��n)�ƣ�a∈{±1��±3.±…��±(M-1)}��φ(t,a)���_(d��)ʽҊ��ʽ(2)��
��������T���}�_���ڣ�g(t)���}�_����(sh��)����(du��)��ʽ(1)�M(j��n)���xɢ�����O(sh��)�� ������(du��)4CP-FSK�{(di��o)�ƺ���̖(h��o)�M(j��n)����ɽ��{(di��o)����ɽ��{(di��o)����Ҋ�D3��
������·������̖(h��o)I(nTs )��Q(nTs)�����п��Եõ�φ(nTs)��Ȼ�����λ�{(di��o)���� �����aԪͬ���͎�ͬ�� �����aԪͬ�� �����aԪ��ͬ�������ڰl(f��)�Ͷ˕r(sh��)��c���ն˕r(sh��)犲�ƥ�䌧(d��o)�µġ��ڽ��ն˵�һ��(g��)��̖(h��o)�����в��״_����Ѳɘӕr(sh��)�̣�����S�C(j��)ȡһ��(g��)�ɘ��c(di��n)�Ĕ�(sh��)��(j��)��������(hu��)��(d��o)�²ɘ��c(di��n)�����Ѳɘ��c(di��n)�����c��Ѳɘ��c(di��n)ƫ�x���D3��ɫ������ƥ��V����(sh��)��(j��)���{(l��n)�c(di��n)����һ��(g��)��̖(h��o)���ڵ��S�C(j��)�ɘ��c(di��n)�����Կ����S�C(j��)�ɘ�����ƫ�x��Ѳɘ��c(di��n)�� ������(du��)�ڰl(f��)��8����ֵ���ն��M(j��n)��ƥ��V����ÿ��(g��)��̖(h��o)������8��(g��)�ɘ��c(di��n)����̖(h��o)ͬ���Y(ji��)��ֻ��8�N���ܡ����O(sh��)��һ��(g��)��̖(h��o)�����вɘ��c(di��n)��λ�Þ�ψε{1��2��3��4��5��6��7��8}���l(f��)���c�ն��lƫ�^С����һ����(sh��)��(j��)���m(x��)�r(sh��)�g��30ms�����O(sh��)һ���е����з�̖(h��o)���ڃ�(n��i)��ͬ��λ������(du��)��׃��ͬ���㷨�ڲ�ͬ��֮�gһֱ̎���\(y��n)�Р�B(t��i)�����w��ͬ���^����D4��ʾ������ 
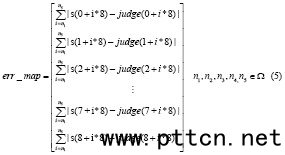
������ͬ���_ʼ�r(sh��)�����ؕr(sh��)犌�(du��)��(sh��)��(j��)�M(j��n)�вɘӣ�Ȼ���͵�ͬ���㷨ģ�K��Ӌ(j��)��ͬ���r(sh��)犡�һ����(sh��)��(j��)������132��(g��)��̖(h��o)����(�l(f��)���M(j��n)����8����ֵ)Խ��ķ�̖(h��o)���ڿ��]�ڃ�(n��i)�Y(ji��)��Խ���_��������132��(g��)��̖(h��o)���ڶ����]�ڃ�(n��i)��(hu��)��(d��o)��Ӌ(j��)���(f��)�s���^�ߣ�ֻÿһ���S�C(j��)�x����N��(g��)(�ڱ�������N=5)��̖(h��o)���ڣ��Ա��C�㷨��(zh��n)�_�ԣ���(du��)�@8*N��(g��)�ɘ��c(di��n)��ֵ������ͬ������r��8�N����(du��)��ÿһ�N�����ԣ���(du��)�ɘ��c(di��n)��ֵͨ�^Ӳ�ЛQ�㷨�M(j��n)���ЛQ����(du��)N��(g��)��̖(h��o)������ÿ��(g��)��̖(h��o)����ͬһ�ɘ��c(di��n)λ�õIJɘ�ֵ�cӲ�ЛQֵ���ֵ���@������ԓ�ɘ��c(di��n)λ���c�ЛQ��̖(h��o)ֵƫ���ֵ�D����С���ǂ�(g��)�ɘ��c(di��n)λ�õ�ֵ��ȡ�鱾��ͬ���ɘ��c(di��n)λ�á����wƫ��ֵ�D�ӵ�Ӌ(j��)��Ҋ��ʽ(5)�����O(sh��)�S�C(j��)�㷨�õ��ķ�̖(h��o)���ڼ��Ϟ�Ω��
��������s(k+i*8)ָһ��(g��)��̖(h��o)�����е�k�c(di��n)�ɘ�ֵ��kεψ��i∈{0,1,2,……,131}ָһ���з�̖(h��o)���ڵ���(bi��o)������Ӳ�ЛQ����(sh��)��Ӌ(j��)�㷽ʽ���£� ����ͨ�^���ƫ��D�ӵ���Сֵ�����_����(zh��n)ͬ��λ�ã��a(ch��n)�����زɘӕr(sh��)犣���һ����(n��i)����ȡ�@��(g��)ͬ���r(sh��)犡� ����ȡһ����(sh��)��(j��)���S�C(j��)ȡ���е�5��(g��)��̖(h��o)���ڵĔ�(sh��)�M(j��n)��ͬ���㷨�\(y��n)�㣬�õ����e(cu��)�`�D����D5��ʾ�����e(cu��)�`�D�ӿ��Եÿ����ڷ�̖(h��o)�ɘ��c(di��n)λ�Þ�4��λ�Þ����ͬ��λ�á� ������ͬ�� ����DMR��ͬ��ͨ�^ͬ��ͻ�l(f��)�е�ͬ���a��(sh��)�F(xi��n)���Z����(sh��)��(j��)����������������Ե�ͬ���a����ͬ���ͻ�l(f��)��������ͬ���aҊ��4.1������ֻ�����е��Z���c��(sh��)��(j��)ͬ���a������ͬ���a���L(zh��ng)��48bit��̎��ͻ�l(f��)�����gλ�á����M(j��n)��MS��BS��MS��MSͨ�ŕr(sh��)���K�˕�(hu��)���ҵ���(du��)���l(f��)����ͬ���a���Դ_���ŵ��Ľ���������  �����Z����̖(h��o)�Գ�����ʽ��ݔ�������ĽM���ɔ�(sh��)��(j��)�·����ɣ�һ��(g��)�Z��������A~F����(360ms)�M�ɣ�Ҋ�D6�����Z��������ݔ�_ʼ��LC(LC Header)�^ͻ�l(f��)��(bi��o)־�Z���ݔ?sh��)��_ʼ�������ݔ?sh��)��Z����(sh��)��(j��)��Ҫ���܄t��LC�^����һ��(g��)PI(PI Header)�^ͻ�l(f��)���ژ�(bi��o)ʾ�Z���ݔ���ܣ���(du��)��ֱͨ���/�p�lBS�D(zhu��n)�l(f��)ģʽ�ڳ�����ݔ�Y(ji��)����һ��(g��)�Z���Y(ji��)��LC terminator��(bi��o)ʾ����һ�㳬���t�����һ��(g��)ͻ�l(f��)�Ĕ�(sh��)��(j��)��ʾԓ�Z�ĽY(ji��)�������� 
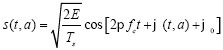
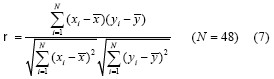
������(du��)�ڙz�y(c��)ͬ���a�ľ��w�����ǣ����ն��ñ���ͬ�������c�յ�����������M(j��n)�����P(gu��n)��Ȼ��z�y(c��)���P(gu��n)ϵ��(sh��)�Ƿ����ij�ֵ�����O(sh��)����?c��i)?sh��)��(j��)ͬ���a��x(n)�����յ���(sh��)��(j��)��֮�У�ȡ�cͬ���a�L(zh��ng)����ȵĔ�(sh��)��(j��)����48����?c��i)?sh��)��(j��)��ӛ��y(n)������ߵ����P(gu��n)ϵ��(sh��)����ʽ�� ������(d��ng)���P(gu��n)ϵ��(sh��)��ֵ����ij�ֵ�r(sh��)����ʾ�z�y(c��)��ijͬ���a����(du��)���ֵ���t��Ҫͨ�^��(sh��)�(y��n)ֵ���O(sh��)���������S�C(j��)�a(ch��n)��������(sh��)��(j��)��Ȼ���c���ص�ͬ���aӋ(j��)������P(gu��n)ϵ��(sh��)��ֵ���õ���ͬ���P(gu��n)ϵ��(sh��)�r(sh��)�ķֲ��D����(sh��)�(y��n)�Ĕ�(sh��)��(j��)�Y(ji��)��Ҋ�D7��ʾ���S�C(j��)�a(ch��n)����100�f��(g��)��(sh��)��(j��)����(du��)�@100�f��(sh��)��(j��)����ȡ48bit�c���ص��Z��ͬ���a�M�����P(gu��n)ϵ��(sh��)�\(y��n)�㣬�惦(ch��)���е����P(gu��n)ϵ��(sh��)��Ȼ��CDF�������ĈD�п��Կ��������������P(gu��n)ϵ��(sh��)��0.85�ĕr(sh��)���ʾͻ����Ϟ����ˣ����Կ����O(sh��)��ͬ���ϕr(sh��)���P(gu��n)ϵ��(sh��)�ֵ��0.85�������������࣬�O(sh��)���ֵ��0.90������ 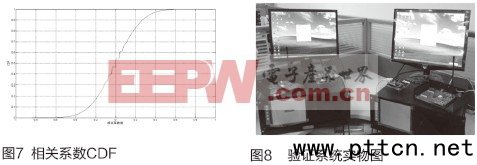 ������ϵ�y(t��ng)���`�a����Ҳ����֪�����@��(g��)�ֵ�O(sh��)��Ҳ�Ǻ����ġ� �����(y��n)�Cϵ�y(t��ng) ����DMRȫ��(sh��)���(y��n)�Cϵ�y(t��ng)��(sh��)��DҊ�D8�����҃ɂ�(c��)��������հl(f��)���ܵĽK�ˡ���ϵ�y(t��ng)��(j��ng)�^�y(c��)ԇ���܉�?q��)��F(xi��n)DMRҎ(gu��)���Ćκ����M�����V���I(y��)��(w��)����ͨԒ���������wͨԒ������USRP�İl(f��)�书�����P(gu��n)����̎�����Ќ�(sh��)�F(xi��n)��DMR����̎������(g��)ģ�K��������ܛ��ģ�K�ķ�ʽ�M(j��n)�з��]���Թ�����ϵ�y(t��ng)�M(j��n)���{(di��o)�á�ϵ�y(t��ng)�ą���(sh��)Ҋ��2������  �����Y(ji��)Փ ����������Ҫᘌ�(du��)����ӵ��о���DMR�(y��n)�Cϵ�y(t��ng)�Č�(sh��)�F(xi��n)���������Ҳֻ�nj�(du��)�P(gu��n)�I�����M(j��n)�о��w���о��������l�{(di��o)�ƽ��{(di��o)���aԪͬ���͎�ͬ���ȡ��ڴaԪͬ����������㷨��ͨ�^���յ��ķ�̖(h��o)������Ϣ�еIJɘӔ�(sh��)��(j��)��Ϣ�M(j��n)��ͬ����������ͨ�^����ǰ��(d��o)�a�M(j��n)��ͬ�����o���˴ȫ��(sh��)��DMR�(y��n)�Cϵ�y(t��ng)���܉��M(j��n)�������Ćκ��ͽM���I(y��)��(w��)��ʾ����Փ���(y��n)�Cϵ�y(t��ng)��ܛģ�K��(g��u)�ɣ��{(di��o)�ƽ��{(di��o)���aԪͬ�����ŵ����a�ȶ���(sh��)�F(xi��n)��ģ�K���b������ܛ����ʽ��(f��)�õ�����ϵ�y(t��ng)�У�����ϵ�y(t��ng)�ܘ�(g��u)��һ��(g��)ͨ�õ�ܛ���o��늼ܘ�(g��u)�����ƏV�������o��ͨ�����P(gu��n)�f(xi��)�h���(y��n)�C��
���������īI(xi��n)�� (�Ї���Ⱥͨ�žW(w��ng) | ؟(z��)�ξ���ꐕ���) |
 (1)
(1) 
 (6)
(6) 

")
�v�C(j��)����")